|
I am a rising first year EECS PhD at MIT advised by Professor Mina Konaković Luković.
I previously studied as an undergraduate student in the
Turing Class at the School of EECS, Peking University.
My research advisor at Peking University was Professor He Wang.
I was also a visiting scholar at Stanford University through the UGVR program in 2024, where I was advised by Professor Leonidas J. Guibas.
|

|
|
|
DexGraspNet 2.0: Learning Generative Dexterous Grasping in Large-scale Synthetic Cluttered Scenes ArXiv / Project Page / Code / Dataset / Bibtex CoRL 2024 We synthesized a large-scale dexterous grasping dataset in cluttered scenes and designed a generative framework to learn grasping in the real world. |
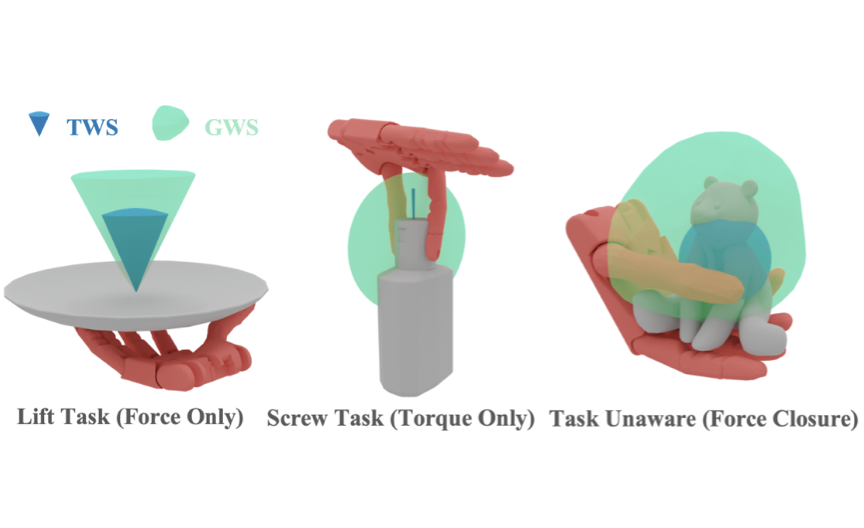 |
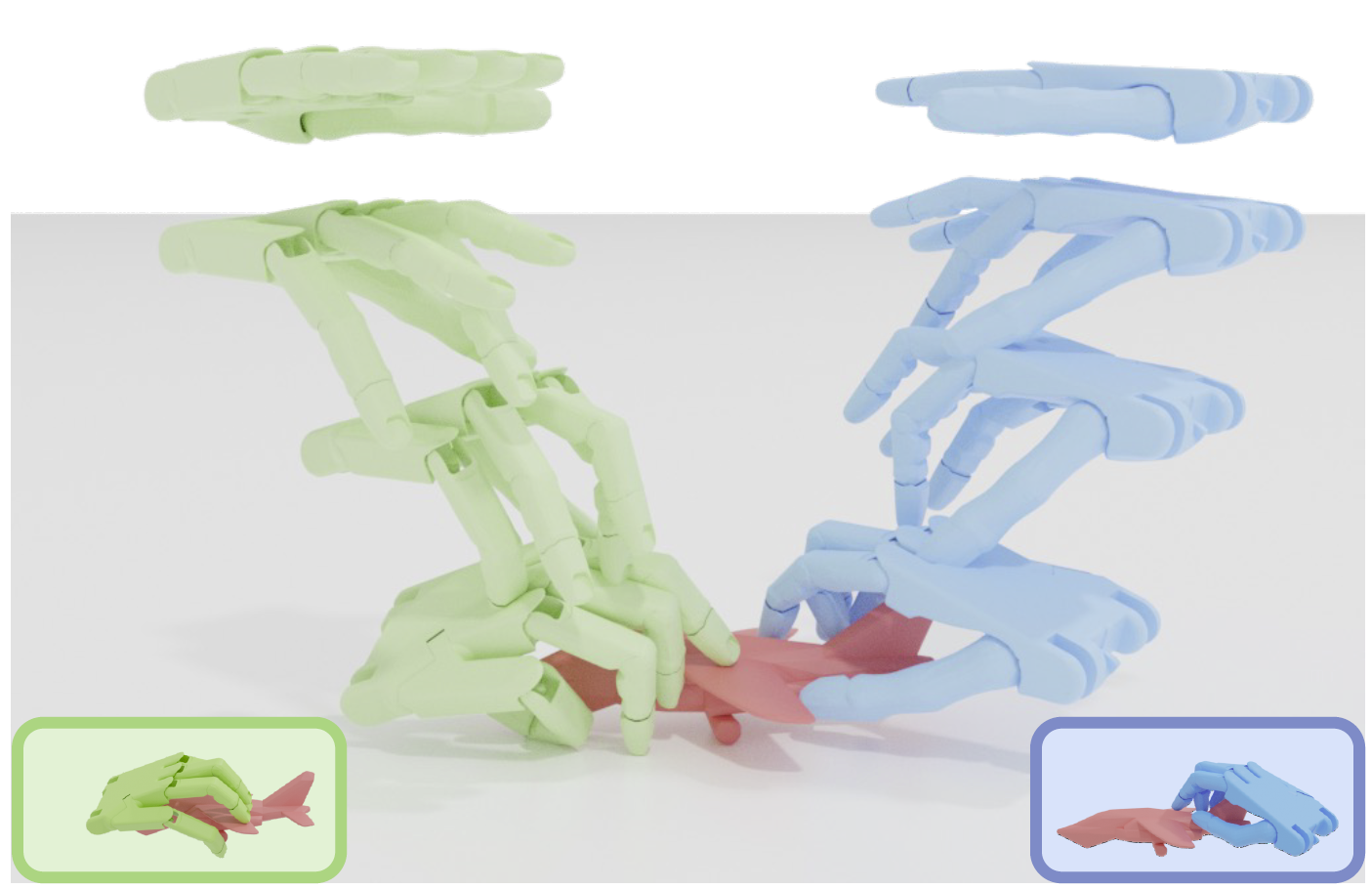
Task-Oriented Dexterous Grasp Synthesis via Differentiable Grasp Wrench Boundary Estimator Jiayi Chen*, ArXiv / Project Page / Bibtex IROS 2024 We propose a differentiable grasp wrench boundary estimator to synthesize task-oriented dexterous grasps. |
 |
UniDexGrasp: Universal Robotic Dexterous Grasping via Learning Diverse Proposal Generation and Goal-Conditioned Policy Yinzhen Xu*, Weikang Wan*, ArXiv / Project Page / Code / CVPR Page / Bibtex CVPR 2023 We tackle the problem of learning universal robotic dexterous grasping from a point cloud observation under a table-top setting. |
 |
DexGraspNet: A Large-Scale Robotic Dexterous Grasp Dataset for General Objects Based on Simulation Ruicheng Wang*, ArXiv / Project Page / Code / Bibtex ICRA 2023, Outstanding Manipulation Paper Finalist We synthesized a large-scale robotic dexterous grasping dataset with our proposed optimization-based grasp synthesis method. |
|
|